Publications
Research contributions in robotics, AI, teleoperation, and embedded intelligence.
Journal of Medical Robotics Research · 2021 · Vol. 06, No. 03n04 · Open Access
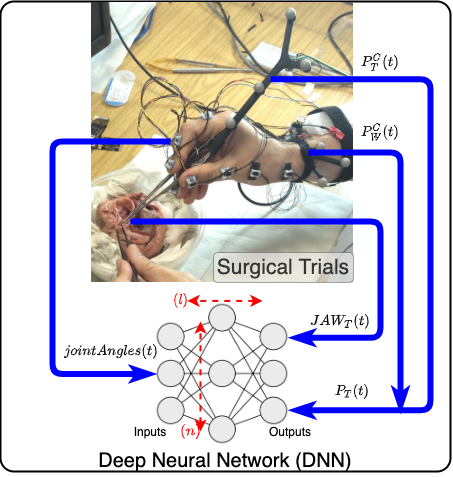
Mapping Surgeons Hand/Finger Movements to Surgical Tool Motion During Conventional Microsurgery Using Machine Learning
A pilot study that trains a deep neural network to map a surgeon's wrist, hand and finger movements to microsurgical tool pose during mock cardiac micro-surgery. A lightweight wearable with 12 joint-angle sensors estimates instrument orientation and jaw angle with under 0.3% mean squared error — a step toward more intuitive teleoperation.
Read publication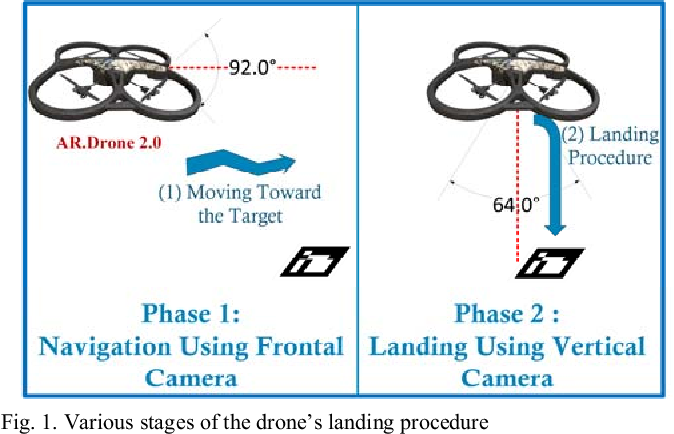
International Conference on Computer and Drone Applications (IConDA) · 2017
Automatic Navigation and Landing of an Indoor AR.Drone Quadrotor Using ArUco Marker and Inertial Sensors
A low-cost system for autonomous indoor navigation and landing of an AR.Drone 2.0 using its front- and bottom-facing cameras with an ArUco marker. When vision is unavailable, inertial measurements fused through a Kalman filter keep navigation reliable, landing the drone accurately on a predefined point.
Read publication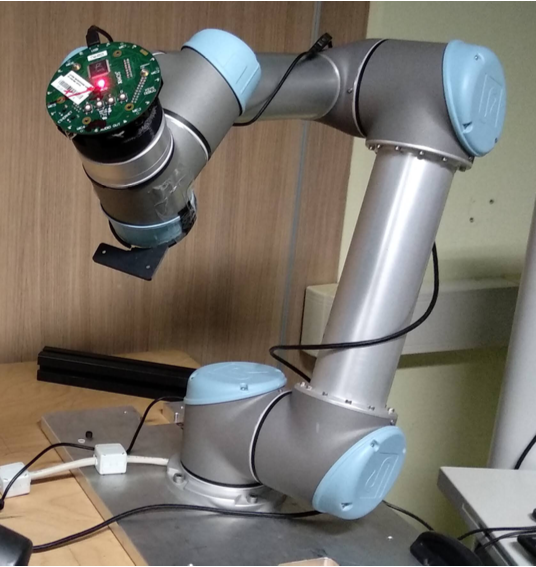
International Conference on Advanced Robotics (ICAR) · 2019
Towards Sound-Source Position Estimation Using Mutual Information for Next-Best-View Motion Planning
An active-perception method (NBV-SPE) for locating stationary sound sources with a single motion-capable acoustic sensor. It combines an Extended Kalman Filter with mutual information to choose the Next-Best-View pose, balancing movement cost and sensor characteristics — demonstrated on a 6-DOF manipulator in indoor and outdoor 3D experiments.
Read publication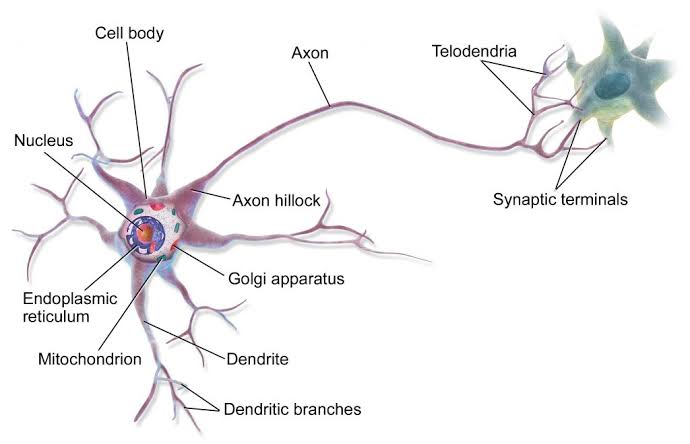
Robotica (Cambridge University Press) · 2019
Experimental Study of Reinforcement Learning in Mobile Robots Through Spiking Architecture of Thalamo-Cortico-Thalamic Circuitry of Mammalian Brain
A spiking neural network — modelled on the brain's thalamo-cortico-thalamic circuitry with 1,090 Izhikevich neurons — learns robot behaviour via spike-timing-dependent plasticity and dopamine-based reward. Validated on the Tabrizbot mobile robot, it cut target-catching time by about 36% after learning.
Read publication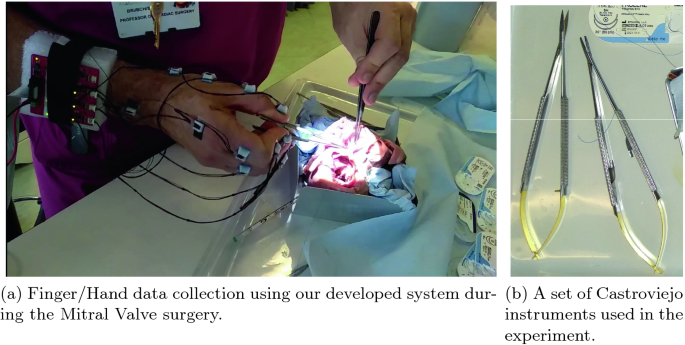
Mediterranean Conference on Medical and Biological Engineering and Computing (MEDICON) · 2019 · Springer · pp. 1515–1525
Towards Finger Motion Tracking and Analyses for Cardiac Surgery
A custom, lightweight IMU finger-tracking system that leaves the surgeon's hands free while capturing joint angles and fingertip positions of the thumb, index and middle fingers during ex-vivo cardiac surgery. Validated against NDI Polaris optical tracking, it analyses suturing and knotting with a Castroviejo instrument to inform a more intuitive master console.
Read publication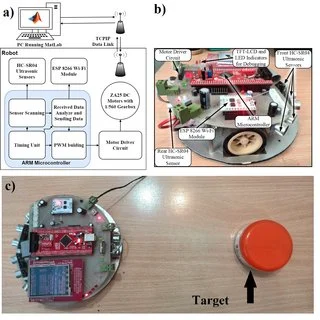
IEEE International Conference on Knowledge-Based Engineering and Innovation (KBEI) · 2017 · pp. 428–433
Unsupervised Learning of Target Attraction for Robots Through Spike-Timing-Dependent Plasticity
An unsupervised spiking neural network (Izhikevich neurons) in which a robot learns target attraction purely through spike-timing-dependent plasticity. Co-firing sensory-to-motor pathways are strengthened while unused synapses decay — validated in simulation on both a mobile robot and a one-DOF robotic arm.
Read publication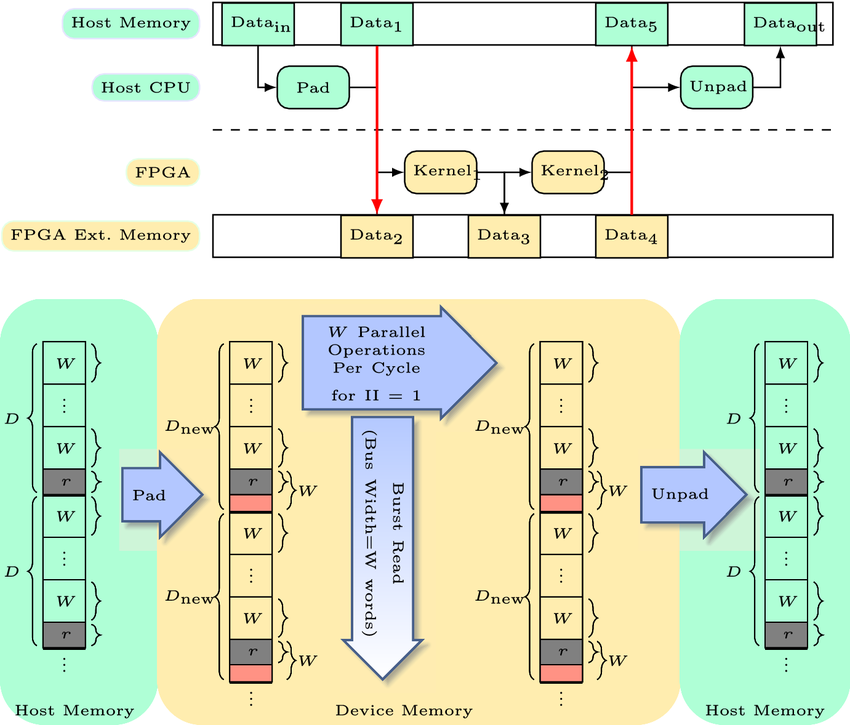
Circuits, Systems, and Signal Processing (Springer) · 2023 · Vol. 42, Issue 2 · pp. 748–779
DGCNN on FPGA: Acceleration of the Point Cloud Classifier Using FPGAs
An FPGA accelerator for the Dynamic Graph CNN (DGCNN) point-cloud classifier that keeps the hardware isolated from the computational graph for reusability. Handling 18 tensor- operation types, burst transfers and multiple processing elements, a single-bitstream Float32 design delivers large speedups over a single-threaded CPU implementation.
Read publication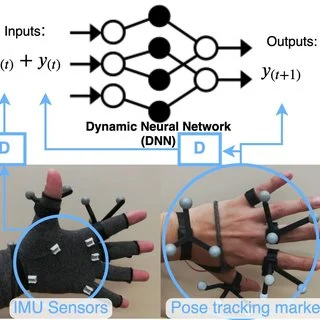
IEEE International Conference on Robotics and Biomimetics (ROBIO) · 2019 · pp. 2964–2970
Palm Reading: Using Palm Deformation for Fingers and Thumb Pose Estimation
A hand-pose sensing approach that detects palm-arch deformation using palm-mounted IMU sensors to estimate joint angles of the thumb, index and middle fingers. Using PCA and dynamic neural networks (with NDI Polaris as ground truth), it estimates digit joint angles with an average error under 4.1%.
Read publication