From Berlin to Schiphol: WeAreDevelopers, a Lost Passport, and an Overbooked Flight
Reflections from my first WeAreDevelopers conference in Berlin, with an unexpected airport adventure along the way.
Read case studyDecision-focused case studies on edge AI and IoT architecture — showing what was at stake, what path was chosen, and how risk was reduced.

Reflections from my first WeAreDevelopers conference in Berlin, with an unexpected airport adventure along the way.
Read case study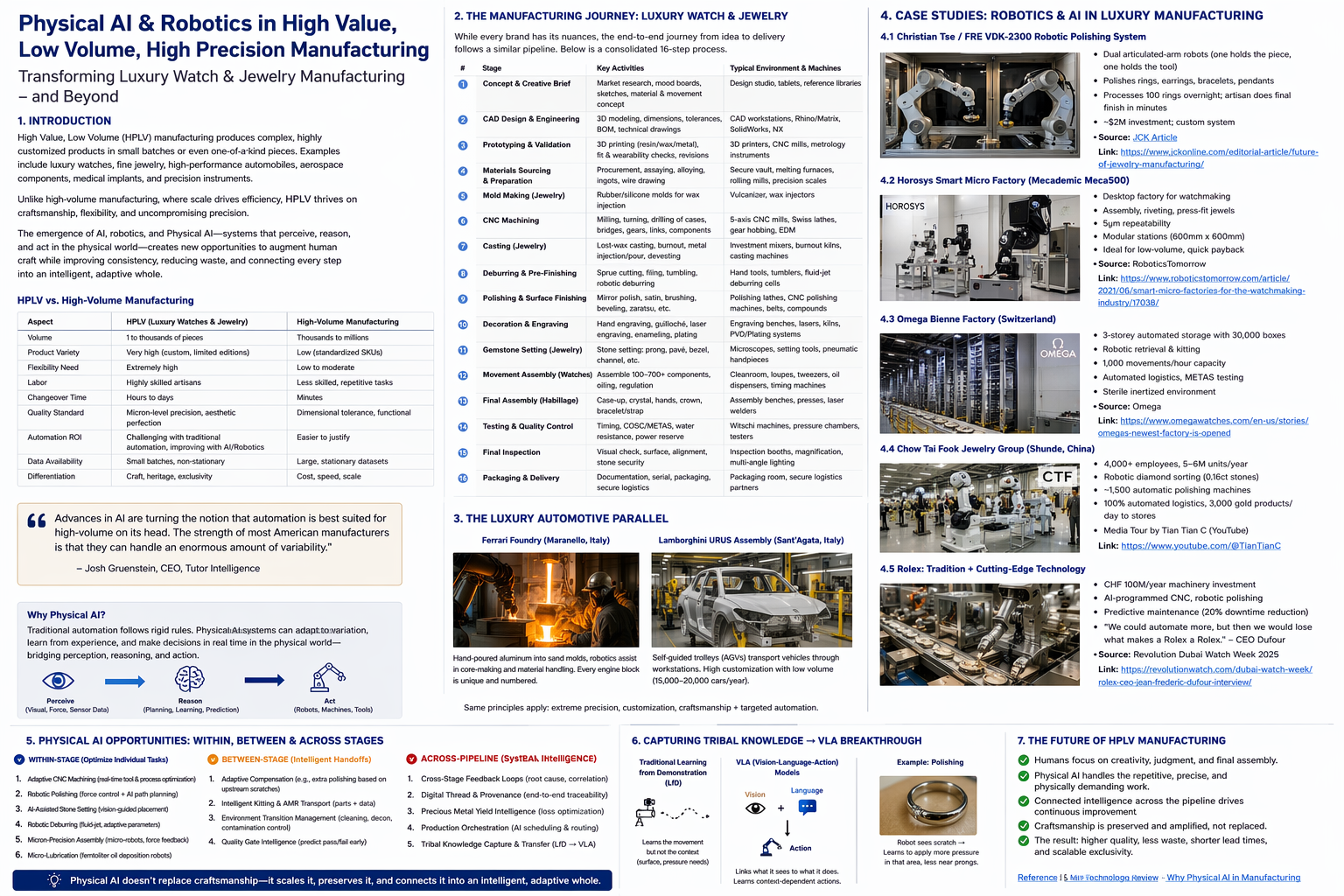
Applying robotics, automation, and AI to high-precision, low-volume manufacturing in watchmaking, jewelry, and related industries.
Read case study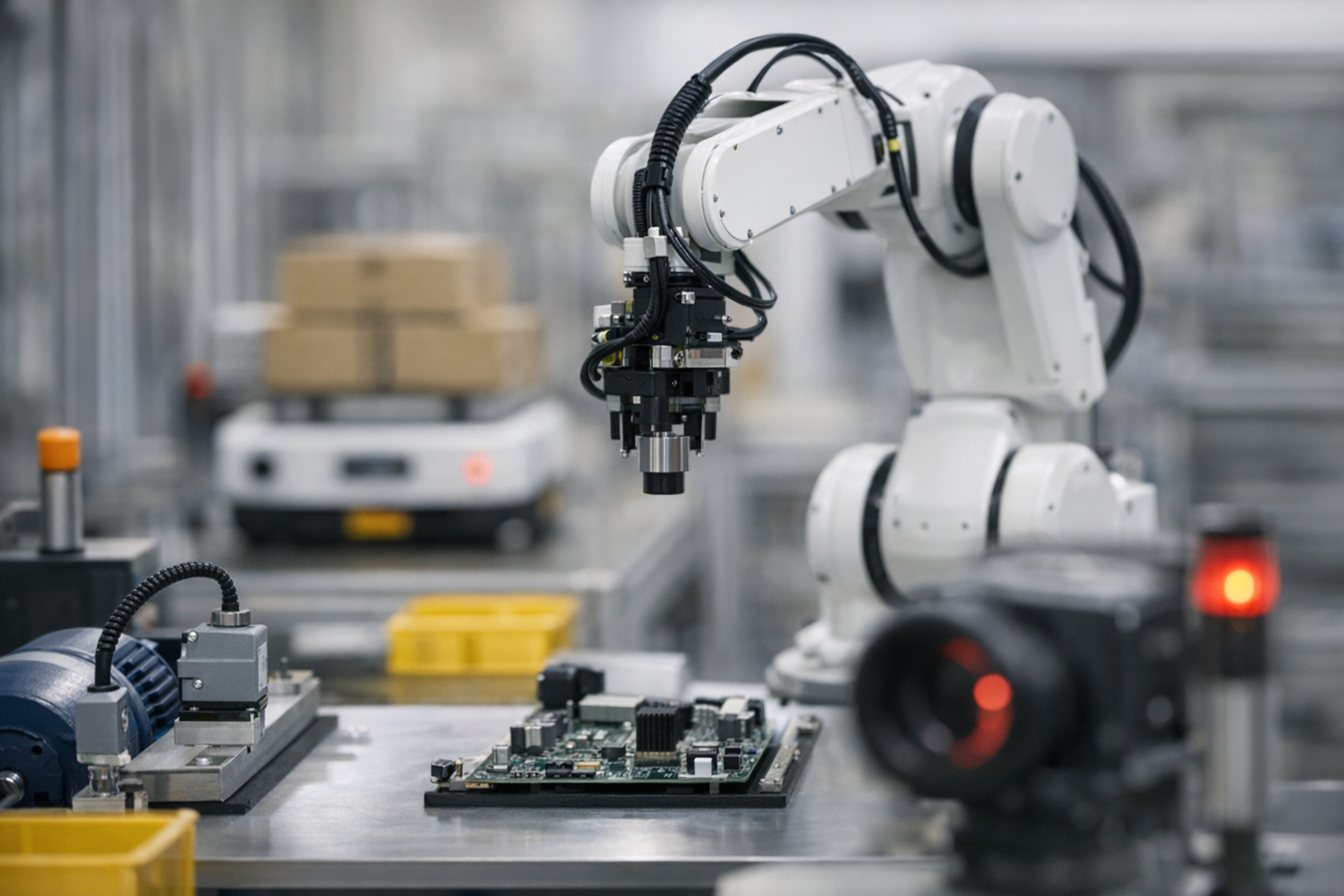
How edge AI enables robots to sense, decide, and act reliably in real-world environments through low-latency, hybrid physical AI architectures.
Read case study
OpenClaw now controls my rover via ROS 2, turning high-level goals into real hardware actions with on-device perception and speech.
Read case study
Integrating Edge Impulse object detection with ROS 2 for real-time perception and tracking on an inspection robot.
Read case study
Contributed to surgical robotics research at Bristol Robotics Laboratory, focusing on intelligent assistance systems and precision automation.
Read case study
Leading innovation in edge AI deployment, helping developers build intelligent IoT solutions with reduced latency and cost.
Read case study
Developed advanced teleoperation systems at the Italian Institute of Technology for remote robotic control in hazardous environments.
Read case study