Authors
Mohammad Fattahi Sani, Brendan Emery, Darwin G Caldwell, Leonardo S Mattos, Nikhil Deshpande
Publication date : 2019/12/2
Conference 2019 19th International Conference on Advanced Robotics (ICAR)
Publisher: IEEE
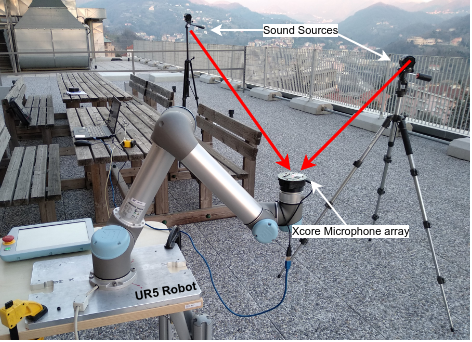
Robotic operations in the real world rely on bearing-only sensors, e.g., optical, acoustic, etc., to sense physical phenomena. Bearing-only sensors are limited because they do not provide range information. To overcome this limitation in estimating source locations, the most common solutions involve making multiple measurements from different locations, either through multiple sensors in the field or a single moving sensor, and then applying triangulation or filtering. In unknown environments with single motion-capable sensors (e.g., mobile robots with on-board sensors), planned motion of the sensor can allow accurate and efficient source position estimation. This paper presents a novel approach in estimating the locations of stationary sources, using a motion-capable sensor. The proposed method combines the concepts of Extended Kalman Filter (EKF) and Mutual Information (MI) from information theory to estimate the Next Best View (NBV) pose to which the sensor should be moved. A utility function, that accounts for the movement cost, the characteristics of the sensor, and the MI and EKF information, facilitates efficient estimation. The proposed algorithm has been implemented in the realworld for Sound-source Position Estimation (SPE), using an acoustic sensor mounted at the end of a 6 degrees-of-freedom (DOF) robotic manipulator. The algorithm, termed as NBV-SPE, proves its utility and performance through preliminary indoor and outdoor experiments for sound sources in 3D space.
read more here. [PDF] from researchgate.net
Leave a Reply